After further investigation, we found that many of our ROVs had several small nicks in the wires. This allowed salt water to enter the plastic jacketing which corroded the wires. Some were corroded all the way into the electronics capsule, which necessitates replacement of the wiring harness. At this point we only have enough spare parts to get three of our five OpenROV’s completely operational. We always leave a spare ROV behind in case something happens; we also do a lot of educational outreach, and having non-functioning units makes that difficult.
The bad ROV corner aka to be fixed or for spare parts!
There is a lot of work ahead for the team, replacing an entire wiring harness is one of the most time consuming portion of building an ROV. Since we only have one additional wiring harness, Leviathan will be receiving the transplant, along with our trial of a DIY neutrally buoyant tether from poly rope, which was donated to us by a volunteer with our team.
Bare wiring harness with 25 wires, sitting next to an ROV chassis
Today 07/22/15
Our team leader Paul has been hard at work with 3D modeling and printing: finalizing the design for his payload rail, making parts for the tether reels, and making adapters to fit Guy Trimby’s florescent coral detecting LED payload to the ROV, and finishing the new tether reels.
Slip ring adapters that allow the wires to not get tangled inside the tether reROV payload rail and accessoriesGuy’s coral detecting LED payload mount, which attaches to the payload reel
Thanks to team member Chris, we were able to finish the repairs to Leviathan and it booted up successfully! There are only two items remaining before the ROVs are ready to their journey: building one more tether reel, and testing both units thoroughly!
One of the last things that Paul needed to finish up his aerial mapping system, was to set up a First Person View (FPV) camera system. Paul wears glasses, and because of this, he had a difficult time finding a set of FPV goggles for flying. After trying a set that that did not fit, which was supposed to be made for people with glasses, he decided to construct one from a welding helmet!
https://cikeys.com/wp-content/uploads/2022/09/CI-Formal-Logo_2A-flat-300x50-1.jpg00Sean Andersonhttps://cikeys.com/wp-content/uploads/2022/09/CI-Formal-Logo_2A-flat-300x50-1.jpgSean Anderson2015-07-23 07:29:012015-07-23 07:29:01Remotely Piloted Systems Research Blog 2015-07-23 07:29:01
As part of this research trip to the Cook Islands, I’m bringing my payload for the OpenROV which has been designed, developed and tested to excite and detect fluorescent proteins in coral reefs. This work is in partial completion of my masters degree at Plymouth University, UK where my research is being completed at Plymouth Marine […]
https://cikeys.com/wp-content/uploads/2022/09/CI-Formal-Logo_2A-flat-300x50-1.jpg00Sean Andersonhttps://cikeys.com/wp-content/uploads/2022/09/CI-Formal-Logo_2A-flat-300x50-1.jpgSean Anderson2015-07-21 15:40:442015-07-21 15:40:44Fluorescent proteins and the British contingent
Check out what my students are doing now and have been doing in recent months with these killer new tools here: The AARR PIRatE Lab Blog. Several of them are exhibiting some of our flying and swimming units at the national DARPA Challenge finals all weekend in Pomona. We were invited to participate in this event by the DoD both due to our excellent outreach and educational efforts across all education levels (middle school, high school, and university) and for our pioneering efforts to use cheap, open source robotics to monitor the coastal zone. Combing the seafloor for oil is but our latest adventure and application for these powerful new tools for environmental assessment. See my students’ blog for what we have been doing and consider swinging by the event at the Pomona Fairplex in Pomona, CA today for the free-to-the-public demos and competition.
Open ROV 2.7: The Black Pearl on our custom launching platform.
What are we doing with robots?
We are using our cheap, small, open source robots to hunt for any evidence of deposited oil on the seafloor near the spill epicenter at Refugio State Beach on May 19. We are interested in assessing the ocean floor near the oil spill site for the presence and density of any subsurface mats, tarballs, oiled algal stands/seagrass meadows, or signs of potentially affected wildlife.
Getting there has been half most of the challenge
We have been pursuing access to the seafloor in the restricted access zone (the area upcoast and downcast from the Refugio pipeline break) for the past two weeks (see Pacific Standard’s piece on this very issue here) through all the formal and informal channels we know of. Daily calls and frequent electronic requests to the JIC and to incident command member agencies have gone nowhere and we still have not been granted access/permission to deploy our tools inside the immediate spill zone. This has been frustrating as we believe we have unique tools that can document deposited oil on the benthos and create a visual record of the amount for the permanent/legal record. Everyone we talk to seems to think our ROV (Remotely Operated Vehicle) survey is a great idea, but no one would pull the trigger to allow us or any of our partners access to the site.
As we have yet to secure legal permission to enter the area where oil was most likely deposited, we opted for the next best thing. This past Thursday we did a quick inspection of Naples Reef, a Marine Protected Area about 14 km (8.5 mi) from the Refugio spill and an area outside the restricted zone. Our Santa Barbara Channelkeeper colleagues have a keen and long-running interest in the goings on a Naples and have been anxious to confirm any (hopefully minor or non-existent) impacts to the reef.
Ben Pitterle (Watershed and Marine Program Director, SB Channelkeeper) and our AARR oil spill team; Tim, Paul, Chris and Blake.
Our motley crew (well, technically we in the PIRatE Lab’s AARR group are motley…our colleagues actual professionals) set out Thursday morning from the Santa Barbara Harbor aboard the Santa Barbara Channelkeeper’s converted 31-foot JC lobster boat the R/V Channelkeeper.
R/V Channelkeeper en route.
A fantastic team
One of the best things about creating and using new tools such as our ROVs is the associated chance to meet tons of great new colleagues and partners. This initial hunt for benthic oil brought together three groups onboard the R/V Channelkeeper; our AARR team, Ben Pitterle from Santa Barbara Channelkeeper, and David Lang from OpenROV. Ben helms all things watershed and marine-related for Channelkeeper as their Watershed and Marine Program Director. David Lang is a co-founder of OpenROV and a partner on our current NOAA grant to educate K-12 students about our coastal environment via innovative curricula and tools (like ROVs). See our recent OpenROV Explorer’s Google Hangout for more info (we talk about looking for oil starting around the 15 minute mark).
Any Oil?
So the buried lead here is that we detected no oil, although this initial survey was quite preliminary. This is of course great news for Naples Reef and our nearshore environment! It is also no surprise as any deposited oil would be most likely be concentrated and therefore observable in the immediate shallow subtidal near the pipeline break up at Refugio. It is also important to note that with every passing day any deposited oil will likely become covered with sediment, detritus, etc. and be that much harder to detect with simple visual inspections.
A great test
This demo showed that our cheap ($1,000 baseline, $2,000 with our modifications) ROV can easily be used for subsurface surveys in the wake of oil spills. Even on a day with poor visibility thanks to the previous nights drizzle. Our small, OpenROV units are portable (fitting within a single Pelican Case or large backpack), adaptable (everything is open source and open to anyone to modify or adapt), and require minimal training (we can bring users up to speed in a handful of days). These units are also easy to assemble (we are doing builds now for various non-robotics savvy labs). Even we (our lab is pretty interdisciplinary but still dominated by ecologists, conservation biologists, and environmental scientists) can build these things…so you know they are user-friendly.
Lastly, it is key to reemphasize that these units could be considered expendable. We are not a wealthy lab by any stretch of the imagination, but sending tech into the sea is always a challenge. Sending tech into a natural disaster context on top of that already hostile milieu translates into a good chance you will lose or break something. We believe it is much better to put a $2,000 unit that can be operated by undergraduates on the case and in harm’s way rather than a several hundred thousand dollar unit requiring highly specialized operators, support staff, etc. This new tech we are proposing is both cheaper and much less riskier. It is even opening the door to potential citizen science groups monitoring swaths of our coasts, oil spill or no. How cool would that be?
This was a great proof of concept trial! We now know that we can indeed use our versatile OpenROV platform to go hunt for oil. We will be returning to sea next week to continue the hunt…hopefully with permission to enter the restricted zone. Keep you fingers crossed!
https://cikeys.com/wp-content/uploads/2022/09/CI-Formal-Logo_2A-flat-300x50-1.jpg00Sean Andersonhttps://cikeys.com/wp-content/uploads/2022/09/CI-Formal-Logo_2A-flat-300x50-1.jpgSean Anderson2015-06-06 15:49:492015-06-06 15:49:49Our ROVs: Prowling for Oil
In complete contrast with last trip to Santa Rosa Island, things have gone quite well! The rest of our intertidal team arrived and brought us a patch kit for the boat, and it’s holding air!
We have been testing our intertidal ROV, the Black Pearl, and it has passed through every test that we’ve thrown at it with flying colors.
Pearl has a set of PVC skids and ballasts which also serve connection points for the intertidal rig. There is an accessory rail with a top down gopro camera, and a second at a 45 degree angle down and forward. Due to the extra weight, additional floats were necessary, but the ROV flies perfectly flat, and straight!
The intertidal system is necessary because there is often a lot of wave action in the shallow subtidal and intertidal zone, and the area is covered in rocks. It would be too dangerous to send in divers, so sending in an ROV is ideal, but running a straight transect is very difficult.
Our system was designed by Paul and uses a gondola, or track/rail set which attaches in the mid intertidal zone via two monofilament lines. The ROV is then launched from offshore by boat or kayak.
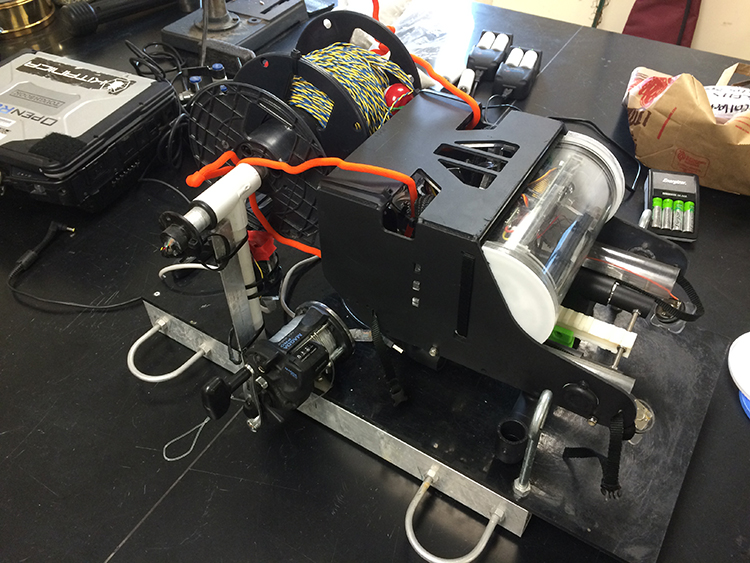
The boat / kayak setup is being designed to allow two National Park Service Intertidal Ecologists to carry one unit, place it on a kayak (their method of travelling between sites) and run their subtidal to intertidal transects after performing the intertidal surveyss. It consists of an aluminum frame with two ocean fishing reels with 150lb test line, a tether reel (with slip ring for tangle free operation) and a Ipad mount. The Ipad is in a submersible case, and provides GPS location, along with ROV control (currently not functioning due to software issues, so a tough book is being used.)
We first tested it by launching it at the pier to prove the concept, and the ROV scooted perfectly along the lines!
Next we took the boat out and ran the lines from the boat to the pier, and yet again Pearl ran it with no problems!
Finally, today was the real test, the system was deployed in the intertidal site. The setup worked very well, there was a wall of sea grass which caused us to need to extend the transect lines back further, but Pearl pushed through the sea grass no problem.